
































































Neu Registrieren
Ich habe noch kein Benutzerkonto und möchte mich kostenlos registrieren.
Zur Registrierung
Roboterassistierte Nierenteilresektion: die (R)Evolution der Nierenchirurgie
18. März 2024
Vor allem bei der Nierenteilresektion zeigt der Da-Vinci-Roboter seine Überlegenheit gegenüber der rein laparoskopischen oder offenen Operationstechnik und überzeugt durch das geringe Gewebstrauma, seine vielen Freiheitsgrade und die Tremorreduktion. Zusätzlich wurden in den letzten Jahren der intraoperative Einsatz von Ultraschalldiagnostik oder die Visualisierung mittels Indozyaningrün (ICG) implementiert.
Aufgrund der Konsole wird bei der roboterassistierten Chirurgie das OP-Gebiet „digitalisiert“. Dies hat (aktuell noch) den Nachteil des fehlenden haptischen Feedbacks, aber ermöglicht neben der enormen Vergrößerung und der hohen Auflösung den Einsatz von revolutionären Technologien. So könnten in naher Zukunft 3D-Modelle des OP-Gebiets im Sinne einer „augmented reality“ gematcht werden, um möglicherweise ein selektives Abklemmen und die Tumorlokalisation zu erleichtern oder um Resektionsgrenzen und die OP-Dauer zu verbessern.
Offen vs. laparoskopisch vs. robotisch: aktueller Stand
Gemäß Leitlinie der EAU (European Association of Urology) sollte bei allen T1-Nierentumoren und bei ausgewählten T2-Nierentumoren (Operabilität, Einzelniere, chronische Nierenerkrankung) eine Nierenteilresektion durchgeführt werden.1 Laut Bradshaw et al. sollte sogar bei allen cT2a-Nierentumoren die Nierenteilresektion in erfahrenen Händen als Erstlinientherapie in Betracht gezogen werden.2
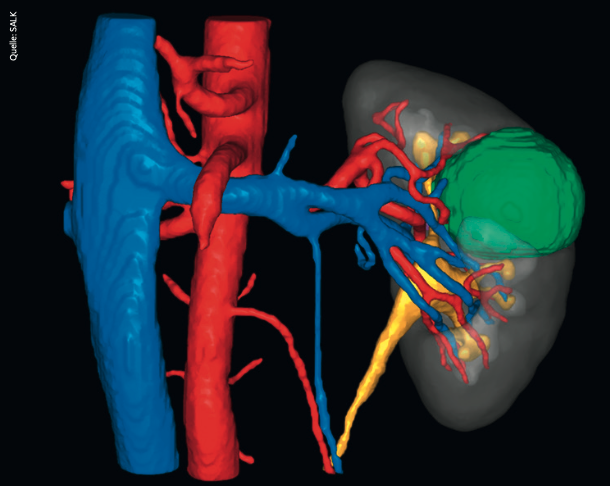
Abb. 1: 3D-Modell von Innersight Labs Ltd.: Der hauptsächlich endophytische Nierentumor (grün) mit enger Lagebeziehung zum oberen Kelchsystem (gelb) bietet anatomisch die Möglichkeit des selektiven Clamping.
Mehrere retrospektive Studien demonstrieren die Vorteile der Nierenerhaltung („nephron-sparing surgery“) mit reduzierter Komorbidität und deshalb erhöhter Überlebensrate. Die Metaanalyse von Cacciamani et al. hat gezeigt, dass die minimalinvasive (roboterassistierte) Nierenteilresektion der offenen Nierenteilresektion bei entscheidenden perioperativen Parametern, wie z.B. Blutverlust, Komplikationen und Dauer des Krankenhausaufenthalts, überlegen ist.3 Diese Überlegenheit lässt sich auch bei komplexen Nierentumorkonstellationen reproduzieren.4 Die Wahl des minimalinvasiven Verfahrens richtet sich hierbei nach Expertise und Fähigkeit der Chirurg:innen und sollte das perioperative Risiko sowie das onkologische und funktionelle Ergebnis nicht kompromittieren. In den letzten 10 Jahren hat die roboterassistierte Da-Vinci-Nierenteilresektion die laparoskopische Nierenteilresektion als präferiertes Verfahren abgelöst und bietet neben den o.g. offensichtlichen technischen Vorteilen einen höheren chirurgischen Komfort.5 In der Metaanalyse von Choi et al. zeigte sich die roboterassistierte Nierenteilresektion gegenüber der laparoskopischen Nierenteilresektion als überlegen, da die Konversionsrate auf eine offene oder auf eine radikale Operation signifikant niedriger war und kürzere warme Ischämiezeiten und eine kürzere Krankenhausaufenthaltsdauer vorlagen.6
Besondere Möglichkeiten der Visualisierung und der „image-guided surgery“7
Das größte Opfer, das mit der roboterassistierten minimalinvasiven Chirurgie gebracht wurde, ist der Verzicht auf das haptische Feedback. Dieser sensorische Verlust erschwert die intraoperative Orientierung durch die Identifizierung von Leitstrukturen und Gefäßen sowie der Tumorlokalisation.
Besondere Möglichkeiten der Visualisierung stehen den Operierenden zur Verfügung, um die fehlende Sensorik auszugleichen. Hierfür haben die Operierenden die Möglichkeit, über die Konsole mithilfe der „Tile-Pro“-Funktion zusätzlich zum Operationsfeld ein weiteres Bildsignal aufzurufen und gleichzeitig anzeigen zu lassen. Vor allem bei komplexen Nierentumoren spielen die unten genannten Anwendungen eine entscheidende Rolle.8
Anwendung einer Ultraschallsonde
Eine „Drop-in“-Ultraschallsonde wird über den Assistententrokar ins OP-Gebiet eingeführt und durch die Operierenden mit einem robotisch gesteuerten Instrument dirigiert. Somit können die Operierenden via „Tile Pro“ das Ultraschallbild mit dem Operationsfeld korrelieren und die Tumorgrenzen definieren. Vor allem bei komplett endophytischen Tumoren und bei multiplen Nierenzysten ist die intraoperative Ultraschalldiagnostik unerlässlich und ermöglicht eine korrekte Dissektion unter Einhaltung der Tumorgrenzen sowie die Schonung von gesundem Gewebe. So konnten Sun et al. mit ihrer retrospektiven Studie über komplett endophytische Nierentumoren zeigen, dass Patient:innen mit intraoperativer Ultraschalldiagnostik signifikant weniger Blutverlust, eine kürzere Ischämiezeit, eine höhere Rate an negativen Resektionsrändern und ein besseres perioperatives Outcome hatten als die Vergleichsgruppe ohne intraoperative Ultraschalldiagnostik.9 Die intraoperative Ultraschalldiagnostik erlaubt zudem die korrekte Einschätzung der Größe und Lokalisation eines Tumorthrombus, falls dieser visuell nicht ausreichend beurteilt werden kann. Mittels Duplexsonografie kann die Perfusion des Tumors und somit z.B. die Qualität des selektiven Clamping oder einer globalen Ischämie beurteilt werden. Mittels CEUS-Technik („contrast-enhanced ultrasonography“) können Nieren- und Tumorarchitektur inklusive der Blutgefäße hochauflösend und präzise dargestellt werden. Hierfür wird ein Kontrastmittel aus stabilisierten Mikrobläschen i.v. appliziert. Nach ca. 20 Sekunden kann die intrarenale räumliche Verteilung dieser Mikrobläschen mittels Reflexion durch den kontrastverstärkten Modus neben dem konventionellen B-Modus dargestellt werden. Im Vergleich zur u.g. ICG-Technik bietet die CEUS-Technik die Möglichkeit einer erneuten Anwendung innerhalb weniger Minuten. Die Mikrobläschen des Kontrastmittels SonoVue® sind zudem nichtnephrotoxisch. Das stabilisierte Schwefelhexachloridgas wird über die Lunge abgeatmet und kann so auch bei niereninsuffizienten Patient:innen angewendet werden.10
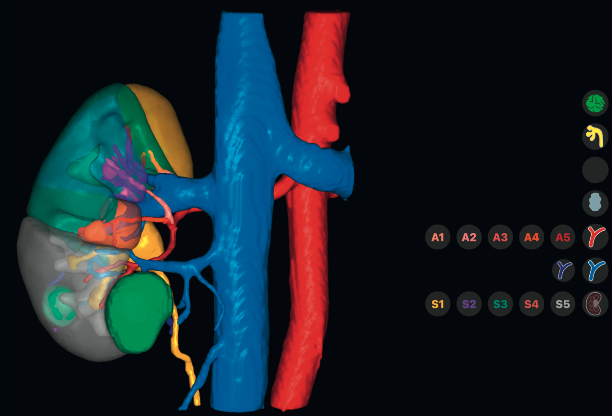
Abb. 2: 3D-Modell von Innersight Labs Ltd.: zwei Nierentumoren (grün) mit enger Lagebeziehung zur unteren Kelchgruppe sowie zum Nierenbecken (gelb). Auf der rechten Seite können die segmentale Gefäßversorgung, aber auch das Nierenparenchym und das Kelchsystem (transparent) ein- oder ausgeschaltet werden.
Die ICG-Proteinkomplexe werden von der Leber durch die Galle ausgeschieden, sodass der Einsatz von ICG bei Leberinsuffizienz kontraindiziert ist. Zudem befinden sich geringe Iodanteile im Marker, sodass eine Iodallergie ebenfalls eine Kontraindikation darstellt.
Zukünftige Technologien und Anwendung von „augmented reality“
Bereits im Jahr 2014 wurde an Möglichkeiten geforscht, um digitale Orientierungshilfen über die OP-Konsole einzusetzen.11 Die Nierenteilresektion ist hierbei für diese Art von digitaler Unterstützungprädestiniert. Die hohe individuelle Vielfalt der Hilusgefäße sowie die teilweise komplett endophytische Tumorlokalisation und die Lagebeziehung des Tumors in Bezug auf Gefäße und Kelchsystem stellen hohe Ansprüche an die Chirurg:innen.
Die flächendeckend verfügbare und präoperativ obligatorische Computertomografiediagnostik erstellt einen 2D-Datensatz, der seit Jahrzehnten für die Nieren-OP-Planung genutzt wird. Mittels 4-Phasen-CT-Urografie-Untersuchung können hochauflösende Bilder <1mm Schichtdicke erzeugt werden, die eine präzise Visualisierung der venösen und arteriellen Gefäßversorgung, der Nierenarchitektur inklusive Kelchsystem sowie der exakten Tumorlokalisation ermöglichen.
Firmen wie Innersight Labs Ltd. oder Medics3D erstellen aus diesen Datensätzen 3D-Modelle, die Vorteile in der präoperativen Planung und in der operativen Umsetzung bringen. Bei der Erstellung und Implementierung dieser 3D-Modelle werden bereits Zukunftstechnologien, wie künstliche Intelligenz und maschinelles Lernen, eingesetzt.12 So kann z.B. aus einem hochauflösenden CT-Datensatz die wahrscheinliche arterielle Versorgung eines Nierentumors berechnet werden. Die entsprechende grafische Umsetzung im 3D-Modell ermöglicht dem/der Operateur:in eine optimierte Entscheidungsfindung in Bezug auf die intraoperative Herangehensweise und z.B. ein selektives Clamping (Abb.1, 2 und 3).
Abb. 3: 3D-Modell von Medics 3D in der „Tile-Pro“-Ansicht: Der intraoperative Vergleich mit einem 3D-Modell erlaubt eine schnelle und sichere Orientierung, auch wenn das „matching“ aktuell noch manuell erfolgt.
Porpiglia et al. zeigten, dass die Anwendung von „augmented reality“ (AR) im Vergleich zur ultraschallgeführten (US) Operation eine höhere Rate an Tumorenukleationen und eine bessere Blutstillung ermöglichte. Dadurch wurde gesundes Nierengewebe geschont und das Kelchsystem weniger häufig verletzt. Das AR-Patientenkollektiv benötigte weniger Bluttransfusionen, hatte eine kürzere OP-Zeit und benötigte postoperativ im Vergleich zur US-Gruppe keine Embolisation und keine Versorgung mit einer Doppel-J-Harnleiterschiene.13 Die größte Herausforderung einer möglichen intraoperativen Anwendung von AR ist das „matching“ oder die Registrierung, d.h., mit dieser Funktion passt sich das 3D-Modell möglichst automatisch und realistisch an das Live-OP-Feld an. Hierbei müssen mehrere Faktoren berücksichtigt werden. Zum einen werden die Patient:innen anders als in der präoperativen CT-Untersuchung seitengelagert. Außerdem verschieben sich die Niere und die Hilusanatomie im Rahmen der Nierenfreilegung, sodass das 3D-Modell entsprechend in jeder räumlichen Achse verzerrt und angepasst werden muss. Neben softwarebasierten Lösungen wird über die Durchführung einer intraoperativen CT-Diagnostik und Navigation nachgedacht.14
Zukunft der roboterassistierten Nierenteilresektion
Die roboterassistierte Nierenteilresektion hat sich gegenüber der offenen und der laparoskopischen Nierenteilresektion durchgesetzt und wird auch in Zukunft die dominierende OP-Technik bleiben.15
Die Monopolstellung des Da-Vinci-Roboters der Firma Intuitive Surgical ist beendet. Interessante und kostengünstigere Konkurrenzmodelle wie das Hugo™ RAS System16 oder die Senhance® Robotic Platform17 wurden bereits bei kleinen Patientenkollektiven getestet und erhöhen den Innovationsdruck auf den Platzhirsch. Die Machbarkeit der roboterassistierten (transperitonealen sowie retroperitonealen) Nierenteilresektion mit dem Da-Vinci-Single-Port-System wurde bereits in den USA und in Asien bewiesen18, und eine europäische Markteinführung wird nach erfolgreicher CE-Zertifizierung in den kommenden Jahren erwartet.19 Vor allem für den begrenzten retroperitonealen Raum könnte das Single-Port-System eine vielversprechende und revolutionäre Technologie sein. Hierfür wurden bereits neue OP-Techniken publiziert, die nun in größeren Patientenkollektiven evaluiert werden müssen.20
Die Zukunft der roboterassistierten Nierenchirurgie liegt in der Fähigkeit der integrierten Bildgebung und Navigation inklusive automatisierter AR sowie in einem erweiterten sensorischen Funktionsumfang wie z.B. der Fähigkeit eines haptischen Feedbacks.21
Übernahme aus ÖGU-aktuell 3/2023

Autor:
Dr. Michael Abenhardt
Dr. Michael Abenhardt
Universitätsklinik für Urologie und Andrologie, Uniklinikum Salzburg

Ursprünglich erschienen:
DD 01|2024
DD 01|2024
Keypoints
- Die roboterassistierte (Da Vinci) hat die laparoskopische Nierenteilresektion abgelöst.
- Zusätzliche intraoperative Diagnostik mittels Ultraschall oder Indozyanidgrün hat sich als neuer Standard etabliert.
- Die roboterassistierte Nierenteilresektion ist der offenen in wichtigen Parametern (Blutung, Komplikation, KH-Aufenthalt) überlegen.
- Mittels „Drop-in“-Ultraschallsonde kann das Operationsfeld abgeglichen und Tumorgrenzen können festgelegt werden.
- Ein 3D-Modell stellt die arterielle Versorgung des Tumors plastisch dar und kann die interoperative Entscheidungsfindung unterstützen.